
 El departamento de I+D+i sigue su camino de ejecutar y promover proyectos de investigación y desarrollo que puedan impactar el sector productivo, comercial y residencial, con propuestas de sistemas de seguridad, monitoreo inteligente y supervisión de áreas [1]. Inmersos en la industria 4.0 y el apoyo incondicional de fabricantes líderes, ratificamos nuestro compromiso de seguir aportando en la transferencia tecnológica en materia de: Smart City, Smart Building, Smart Factory, Smart Home, Smart Spaces y Domótica [2].
El departamento de I+D+i sigue su camino de ejecutar y promover proyectos de investigación y desarrollo que puedan impactar el sector productivo, comercial y residencial, con propuestas de sistemas de seguridad, monitoreo inteligente y supervisión de áreas [1]. Inmersos en la industria 4.0 y el apoyo incondicional de fabricantes líderes, ratificamos nuestro compromiso de seguir aportando en la transferencia tecnológica en materia de: Smart City, Smart Building, Smart Factory, Smart Home, Smart Spaces y Domótica [2].
Uno de los fabricantes estelares, de los que ilumeyco es representante, es ifm electronic gmbh. El fabricante alemán, es pionero en la inserción al mercado de muchos productos, demostrado igual por los premios de innovación recibidos [3]. En 2005 ifm recibe el premio Hermes en la feria de Hannover, Alemania, por ser el primer fabricante en introducir tecnología PMD (Photonic Mixer Device) en sensores ópticos de distancia [4]. El principio de funcionamiento del PMD es el fenómeno conocido como la medida del tiempo de vuelo (ToF) [4]. Hoy por hoy, ifm ya tiene todo un portafolio de soluciones con cámaras y/o sensores ópticos con tecnología PMD, que incluyen, medidores de distancia, detectores de perfiles, cámaras y sensores 3D para la inspección visual en procesos de producción y control de calidad, y cámaras y/o sensores 3D para el monitoreo inteligente de espacios y para sistemas de seguridad y anticolisión en máquinas móviles [5].
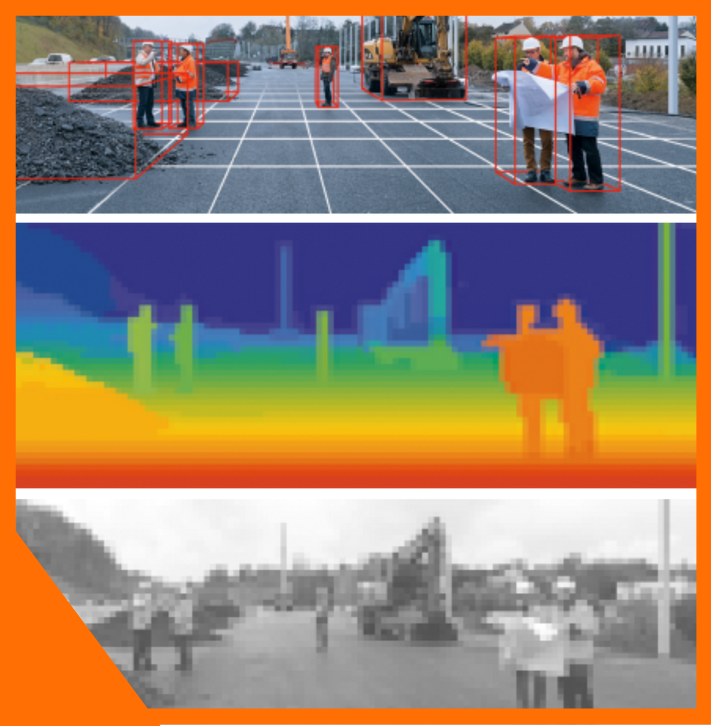
 El sensor O3M está diseñado especialmente para soportar condiciones adversas dentro del campo de trabajo, tales como, polvo, niebla, luz solar y oscuridad extrema, lo que lo hace robusto para un sin número de aplicaciones muy prácticas [6]. La robustez y fiabilidad de este sensor, viene dada principalmente, por el uso de una unidad de iluminación infrarrojos, de cierta potencia (45w), que viene exclusivamente para tales fines [8]. Incluso, esta unidad de iluminación es disparada por la lógica del propio sensor usando una conexión especial, lo que implica, que más que un sensor, es un conjunto de dispositivos: conjunto O3M o sistema de cámaras 3D como a veces le llamamos [7].
El sensor O3M está diseñado especialmente para soportar condiciones adversas dentro del campo de trabajo, tales como, polvo, niebla, luz solar y oscuridad extrema, lo que lo hace robusto para un sin número de aplicaciones muy prácticas [6]. La robustez y fiabilidad de este sensor, viene dada principalmente, por el uso de una unidad de iluminación infrarrojos, de cierta potencia (45w), que viene exclusivamente para tales fines [8]. Incluso, esta unidad de iluminación es disparada por la lógica del propio sensor usando una conexión especial, lo que implica, que más que un sensor, es un conjunto de dispositivos: conjunto O3M o sistema de cámaras 3D como a veces le llamamos [7].
Dentro de la amplia gama de aplicaciones del conjunto O3M, nosotros las hemos clasificado en dos grandes grupos según la movilidad o no del sensor, aunque en ocasiones estén relacionadas:
A) Uso en máquinas móviles (el sensor está en movimiento)
B) Uso en el monitoreo inteligente de espacios y/o supervisión de áreas (el sensor está en un lugar fijo)
 En este artículo, nos enfocaremos en el uso del conjunto O3M en aplicaciones exclusivamente de monitoreo inteligente de espacios, identificadas principalmente por estar la cámara y/o sensor en un lugar fijo con una altura y un ángulo de inclinación “observando” un espacio determinado. El sentido de inteligencia en el sistema viene dado por la capacidad de procesamiento de las imágenes, los algoritmos de segmentación y detección que internamente maneja el microcomputador del sensor, así como el uso de su bus de comunicación para comunicarse con periféricos. Dentro de las funcionalidades del software de operación del sensor es posible, por ejemplo, definir hasta 64 ROIs (Region Of Interest), donde podemos disponer de varias funciones matemáticas y lógicas para la operación de las mismas e incluso poder obtener un resultado determinado en una salida física usando un PLC básico (basic controller) comunicado por medio del Bus CAN. Este último elemento puede ser programable con el estándar industrial IEC 61131-3 CODESYS 2.3, permitiendo tener señales de entrada y salida desde y hacia la lógica del sensor [10].
En este artículo, nos enfocaremos en el uso del conjunto O3M en aplicaciones exclusivamente de monitoreo inteligente de espacios, identificadas principalmente por estar la cámara y/o sensor en un lugar fijo con una altura y un ángulo de inclinación “observando” un espacio determinado. El sentido de inteligencia en el sistema viene dado por la capacidad de procesamiento de las imágenes, los algoritmos de segmentación y detección que internamente maneja el microcomputador del sensor, así como el uso de su bus de comunicación para comunicarse con periféricos. Dentro de las funcionalidades del software de operación del sensor es posible, por ejemplo, definir hasta 64 ROIs (Region Of Interest), donde podemos disponer de varias funciones matemáticas y lógicas para la operación de las mismas e incluso poder obtener un resultado determinado en una salida física usando un PLC básico (basic controller) comunicado por medio del Bus CAN. Este último elemento puede ser programable con el estándar industrial IEC 61131-3 CODESYS 2.3, permitiendo tener señales de entrada y salida desde y hacia la lógica del sensor [10].
Por medio del software Vision Assistant, es posible la configuración del equipo desde un computador, usando ethernet y CAN como buses de comunicación. De igual forma, el sensor puede configurarse para que por medio del protocolo UDP por ethernet pueda trasmitir imágenes y ciertos parámetros [11].
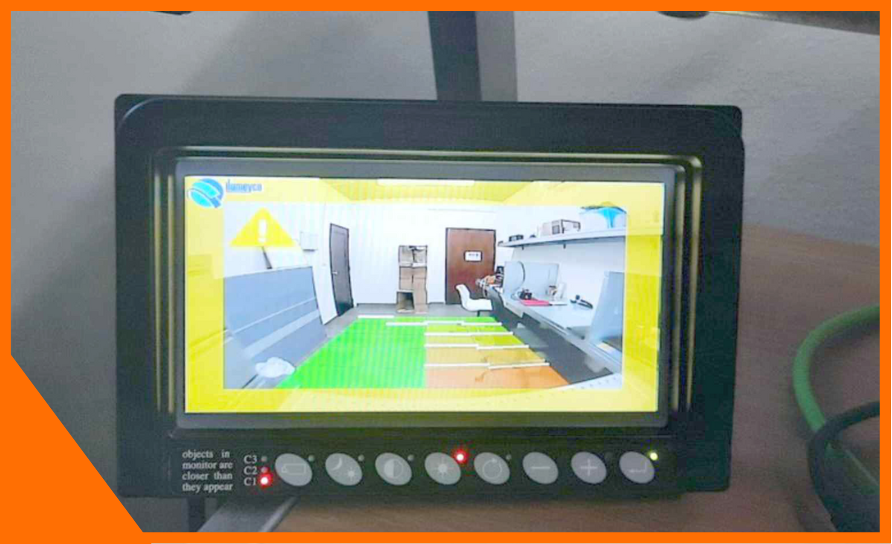 La cámara 3D de la serie O3M posee el mismo dispositivo sensor PMD pero con diferentes ópticas según el modelo. Incluso, en algunos modelos se cuenta con la posibilidad de incorporar una cámara 2D analógica para visualizar imágenes con mucho más resolución y color en comparación con el sensor PMD. La serie O3M1x1 se refiere al sensor sin cámara analógica, y la O3M2x1 cuando la trae de serie. En este último caso, es posible acoplar un monitor LCD que permite la visualización de las imágenes 2D, asociadas a las regiones de interés (ROI) u otras delimitaciones definidas en la cámara 3D, mostrando la escena en una especie de realidad aumentada (overlay), que el mismo sensor procesa, algo muy valioso al momento de monitorizar espacios de manera inteligente [11-12].
La cámara 3D de la serie O3M posee el mismo dispositivo sensor PMD pero con diferentes ópticas según el modelo. Incluso, en algunos modelos se cuenta con la posibilidad de incorporar una cámara 2D analógica para visualizar imágenes con mucho más resolución y color en comparación con el sensor PMD. La serie O3M1x1 se refiere al sensor sin cámara analógica, y la O3M2x1 cuando la trae de serie. En este último caso, es posible acoplar un monitor LCD que permite la visualización de las imágenes 2D, asociadas a las regiones de interés (ROI) u otras delimitaciones definidas en la cámara 3D, mostrando la escena en una especie de realidad aumentada (overlay), que el mismo sensor procesa, algo muy valioso al momento de monitorizar espacios de manera inteligente [11-12].
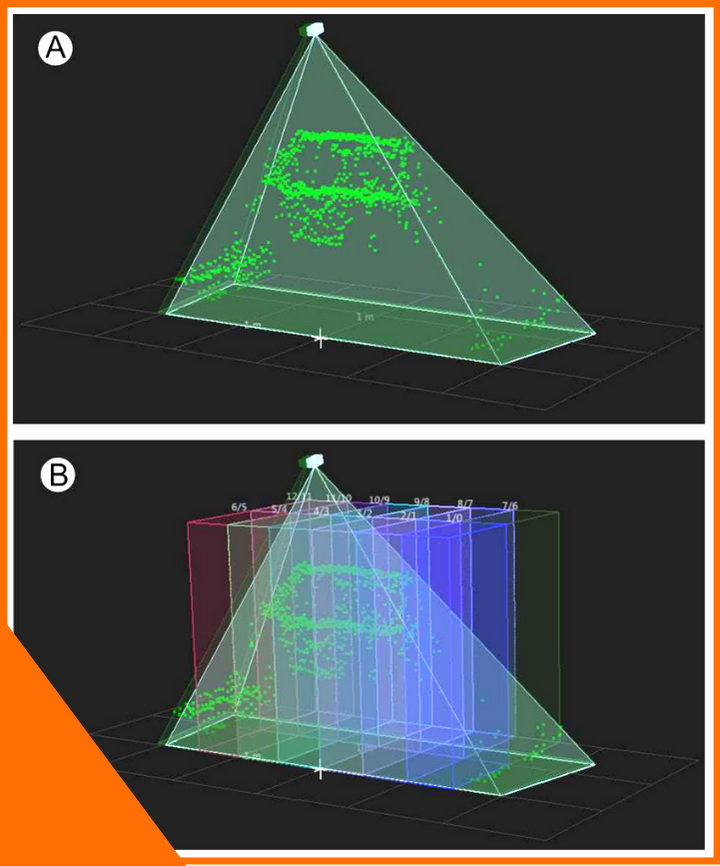
 La resolución del sensor PMD es, (WxH), de 64×16; es decir, que tiene 64 columnas de 16 pixeles (px) en todo el ancho del sensor, para una resolución espacial de Np=1,024pxs. Esto implica que el sensor mide distancia en 1,024 puntos de todo el espacio de cobertura que la lente pueda estar mirando. En tal sentido, si se tiene una óptica más enfocada (angularmente más cerrada), se tiene mayor resolución espacial y menos cobertura, y viceversa si mantenemos la misma distancia al objeto en ambos casos. En tal sentido, la nomenclatura es dada por O3Mxy1, donde y=5,6,7 según la óptica. Así, el modelo O3M261 es un sensor con cámara 2D (x=2) y y=6 indicando una apertura angular de la lente de 95°x32° [13].
La resolución del sensor PMD es, (WxH), de 64×16; es decir, que tiene 64 columnas de 16 pixeles (px) en todo el ancho del sensor, para una resolución espacial de Np=1,024pxs. Esto implica que el sensor mide distancia en 1,024 puntos de todo el espacio de cobertura que la lente pueda estar mirando. En tal sentido, si se tiene una óptica más enfocada (angularmente más cerrada), se tiene mayor resolución espacial y menos cobertura, y viceversa si mantenemos la misma distancia al objeto en ambos casos. En tal sentido, la nomenclatura es dada por O3Mxy1, donde y=5,6,7 según la óptica. Así, el modelo O3M261 es un sensor con cámara 2D (x=2) y y=6 indicando una apertura angular de la lente de 95°x32° [13].
El sensor opera con diferentes firmwares dependiendo la gama de aplicaciones. Para el caso que nos compete, sobre monitoreo inteligente de espacios, recomendamos la actualización del firmware DI (Distance Image) [14]. Al momento de configurar el sensor, son muchos los parámetros en diferentes fases que pueden ser fijados, desde el set-up del equipo, la configuración de la imagen (ROIs, delimitaciones, filtros), el editor lógico (variables de ejes, funciones matemáticas, lógicas, etc), configuración de la red y la fase de calibración de cámara.
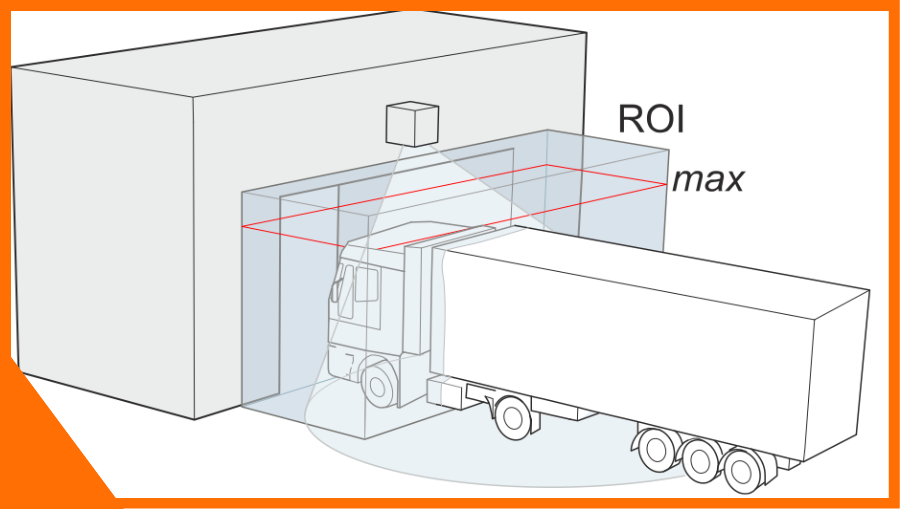
La fase de “calibración de cámara” merece especial atención dentro de todas las mencionadas en el párrafo anterior, puesto que es importante que se lleve a cabo de la manera más efectiva posible. Por medio de la calibración, la cámara 3D puede ajustar las dimensiones de un punto en el mundo real observado en un punto (u,v,w) en los algoritmos internos del sensor. Esto es fundamental para que el sistema pueda discriminar según el tamaño real de los objetos [10]. En este proceso de calibración, los detalles más importantes a configurar son los siguientes:
A) delimitaciones laterales con que el sensor no debe contar
B) fijación de la altura del sensor y del ángulo de inclinación del mismo.
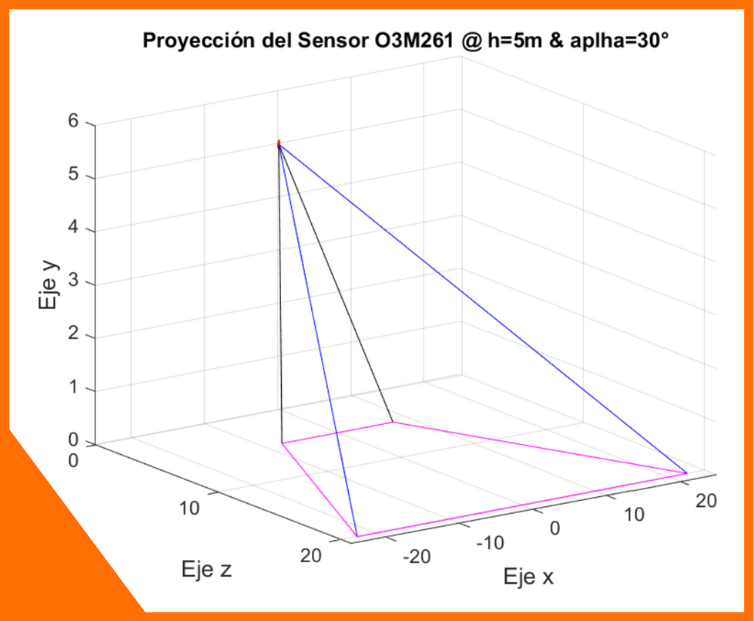 Estos dos últimos parámetros, son los que determinan el espacio de cobertura y alcance de detección de objetos en el espacio vigilado. El campo de visión o área de cobertura proyectada, por ejemplo a nivel del suelo, es de forma trapezoidal debido a las proyecciones geométricas propias del modelo pin-hole de cámara para un ángulo de inclinación dado [15]. En ilumeyco hemos desarrollado una técnica para que fácilmente podamos determinar, tanto el área de cobertura, como la resolución espacial que deben tener los objetos para su correcta detección, independientemente de la altura y el ángulo de inclinación del sensor al momento de diseñar sistemas de monitoreo inteligente de espacios. Este trabajo es dado en [16].
Estos dos últimos parámetros, son los que determinan el espacio de cobertura y alcance de detección de objetos en el espacio vigilado. El campo de visión o área de cobertura proyectada, por ejemplo a nivel del suelo, es de forma trapezoidal debido a las proyecciones geométricas propias del modelo pin-hole de cámara para un ángulo de inclinación dado [15]. En ilumeyco hemos desarrollado una técnica para que fácilmente podamos determinar, tanto el área de cobertura, como la resolución espacial que deben tener los objetos para su correcta detección, independientemente de la altura y el ángulo de inclinación del sensor al momento de diseñar sistemas de monitoreo inteligente de espacios. Este trabajo es dado en [16].
Desarrollo de una aplicación en concreto:
Sistema de vigilancia en rampas de carga/descarga de camiones por medio del sensor O3M
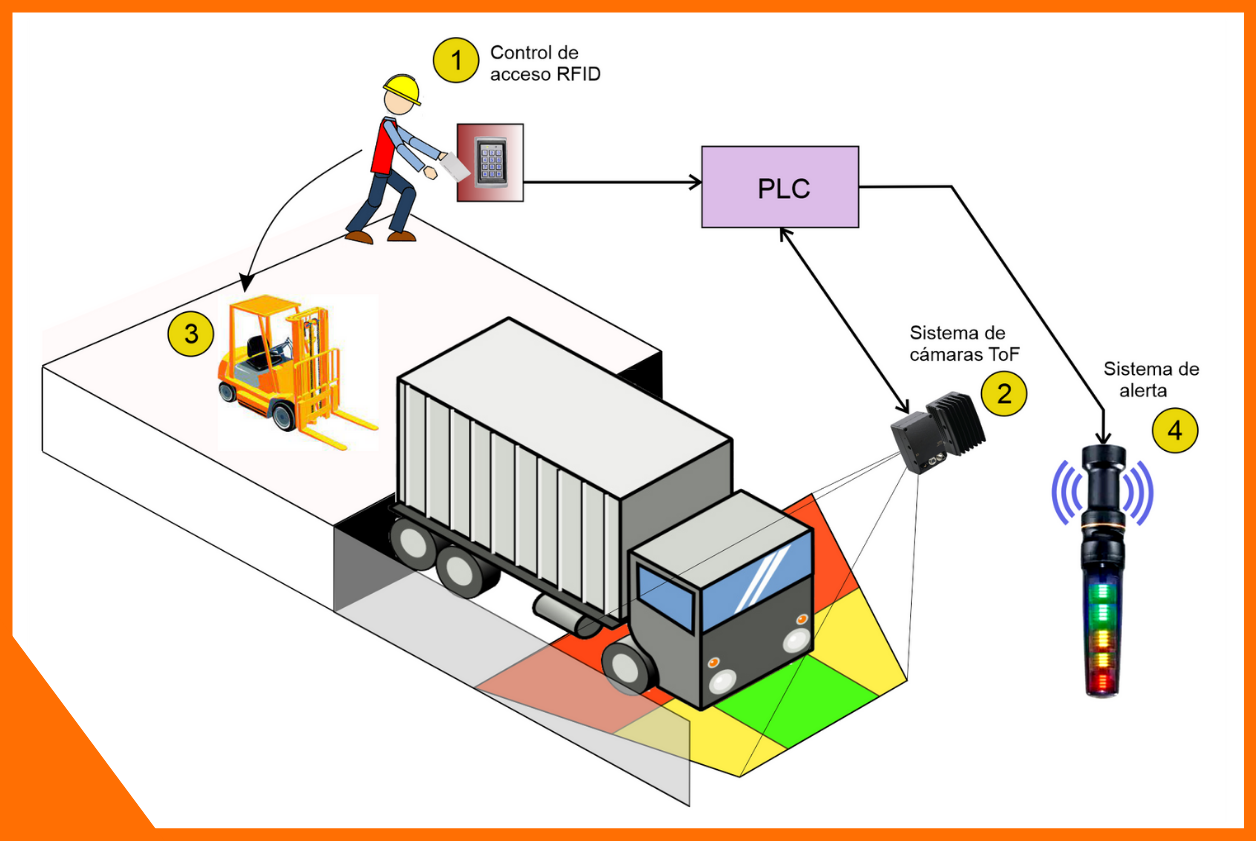
 Es un sistema de vigilancia y alarma para rampas de carga/descarga de camiones en las instalaciones de cualquier industria, por medio del uso del sistema de cámaras 3D (ToF) (serie O3M). La operación y funcionalidad del sistema debe prestar solución al problema de controlar el factor humano en la sincronización del operador de montacargas (montacarguista) en la rampa y el conductor del camión, para que el segundo no incurra en maniobras, si el montacargas está todavía trabajando dentro o fuera de del vagón del camión. La inteligencia del sistema de monitoreo viene dada por la capacidad de dar diferentes niveles de alarmas según la ubicación del conductor en los alrededores de la cabina del camión. Incluso, el sistema puede configurarse para la eliminación de falsos positivos cuando un objeto o algún animal (por ejemplo, un perro o gato) pueda estar cerca de la cabina.
Es un sistema de vigilancia y alarma para rampas de carga/descarga de camiones en las instalaciones de cualquier industria, por medio del uso del sistema de cámaras 3D (ToF) (serie O3M). La operación y funcionalidad del sistema debe prestar solución al problema de controlar el factor humano en la sincronización del operador de montacargas (montacarguista) en la rampa y el conductor del camión, para que el segundo no incurra en maniobras, si el montacargas está todavía trabajando dentro o fuera de del vagón del camión. La inteligencia del sistema de monitoreo viene dada por la capacidad de dar diferentes niveles de alarmas según la ubicación del conductor en los alrededores de la cabina del camión. Incluso, el sistema puede configurarse para la eliminación de falsos positivos cuando un objeto o algún animal (por ejemplo, un perro o gato) pueda estar cerca de la cabina.
En esta sección de este artículo hemos concebido un sistema de vigilancia y alarma funcionalmente básico, sin embrago, puede llegar a tener tanto nivel de sofisticación como se necesite o lo requiera el cliente, tomando en cuenta la implicación de un mayor tiempo de desarrollo y costo final. En el prototipo descrito, llamado ilumeyco-O3M-SVC-V1.0, se propone la instalación del conjunto O3M que permitirá la vigilancia de las zonas cercanas a la cabina del camión (con el uso de varias ROIs); además de un sistema de control de acceso que permita asociar al conductor del montacargas con la activación del sistema de alarma, y finalmente como sistema de alerta visible y auditiva, se tendrá una torre luminosa de 5 segmentos LED (RGB) con buzzer incorporado [17]. En esta torre, los segmentos se irán encendiendo progresivamente dependiendo de la proximidad de cualquier objeto en movimiento hacia las puertas de la cabina del camión, según las ROIs activadas. La potencia del buzzer es de hasta 85 dB, activándose sólo cuando encienda el segmento rojo, indicando que el objeto ya está cerca de las puertas y activando la alerta de máximo riesgo. Conectado a todos estos elementos y como unidad de control de estados y temporización, se encuentra el módulo de control, cuyo elemento principal es un PLC. El sistema descrito puede observarse en la siguiente figura, y su modo de operación se describe a continuación:
 Estado 0: El sistema está en un estado de “stand by”. El modo de vigilia por parte de la cámara está desactivado, y el sistema completo se encuentra a la espera de que lo activen por medio del sistema de control de acceso.
Estado 0: El sistema está en un estado de “stand by”. El modo de vigilia por parte de la cámara está desactivado, y el sistema completo se encuentra a la espera de que lo activen por medio del sistema de control de acceso.
Estado 1: El operador del montacargas (montacarguista) posee su tarjeta RFID previamente configurada, donde asocia sus datos personales con la actividad de ese momento. Por tanto, este estado inicia cuando él activa el sistema de alarma con su tarjeta de acceso desplazándose físicamente a un lugar, en algún punto seguro en la rampa de carga/descarga, donde se encuentra el sistema receptor RFID.
Estado 2: Una vez en marcha el estado 1, de manera instantánea el sistema de cámaras ahora pasa al estado de vigilancia permanente, identificando las diversas zonas (ROIs) que se hallan configurado previamente. Las zonas, virtualmente pueden definirse según su riesgo con diferentes colores: verde, amarillas y rojas, para que el sistema de alerta visual responda de la misma manera.
Estado 3: El montacarguista, según se desplaza desde el punto de control de acceso hasta el montacargas, puede comprobar que el sistema de alarma ya está activo, verificando la luz de “activo” de la torre de LEDs (el primer segmento verde) y/o una luz piloto en el punto de acceso. En este momento, el montacarguista ya puede operar libremente en su misión de carga y descarga. Este estado de vigilia culmina cuando el montacarguista vuelve al punto de control de acceso y, al acercar la tarjeta RFID, desactiva el estado, dando paso al estado de “stand by”.
 Estado 4: Si el estado 3 está activo, y alguna persona se acerca a las zonas aledañas a la cabina del camión, en aproximadamente 1 metro de distancia por los lados y al frente (ROIs definidas tal cual se ven en la figura), el sistema de alerta visual comienza a activarse, es decir, la torre de LEDs encenderá desplegando colores según las ROIs activadas. Así pues, como la ROI verde es de baja incidencia, si se encuentra una persona en esta, se encendrá el segundo segmento verde de la torre; si se encuentra en las ROIs amarillas ya de debe alertar de la misma forma en la torre (dos segmentos amarrillos), y si se encuentra en las ROIs de color rojo, el sistema procede a tomar alguna acción, además de encender la luz roja y el buzzer. Lo anterior indica, que la persona en movimiento ya está muy cerca de las puertas de la cabina por lo que es activada la alerta de máximo riesgo.
Estado 4: Si el estado 3 está activo, y alguna persona se acerca a las zonas aledañas a la cabina del camión, en aproximadamente 1 metro de distancia por los lados y al frente (ROIs definidas tal cual se ven en la figura), el sistema de alerta visual comienza a activarse, es decir, la torre de LEDs encenderá desplegando colores según las ROIs activadas. Así pues, como la ROI verde es de baja incidencia, si se encuentra una persona en esta, se encendrá el segundo segmento verde de la torre; si se encuentra en las ROIs amarillas ya de debe alertar de la misma forma en la torre (dos segmentos amarrillos), y si se encuentra en las ROIs de color rojo, el sistema procede a tomar alguna acción, además de encender la luz roja y el buzzer. Lo anterior indica, que la persona en movimiento ya está muy cerca de las puertas de la cabina por lo que es activada la alerta de máximo riesgo.
A continuación, hacemos un breve repaso de las posibilidades de potencializar el sistema básico presentado. En tal sentido se podrían tener las siguientes configuraciones:
A) En lugar de tener un control de acceso con RFID, podríamos tener un segundo sistema O3M haciendo la detección automática de maniobras del montacargas, lo que activaría el sistema de vigilancia permanente de forma automática (Estado 1 de forma automática, sin necesidad de tarjetas RFID de los montacarguistas).
 B) Es posible utilizar un modelo de sensor O3M con una cámara de video analógico incorporado (el sistema descrito anteriormente no la incluye), para la monitorización visual, igual con la posibilidad de grabar el video en un DVR.
B) Es posible utilizar un modelo de sensor O3M con una cámara de video analógico incorporado (el sistema descrito anteriormente no la incluye), para la monitorización visual, igual con la posibilidad de grabar el video en un DVR.
C) Partiendo de la configuración en A) ambos sistemas de sensores OM3, podrían traer la cámara de video analógico incorporado.
D) La incorporación de monitores y teclados industriales para una mayor visualización de elementos y la posibilidad de configurar parámetros básicos del sistema en el campo.
E) La incorporación de hasta tres cámaras analógicas más por cada conjunto O3M y posibilidad de registro de la información, incluso por trasmisión inalámbrica.
F) Es posible la incorporación de otro conjunto O3M para la supervisión de carga y descarga del vagón del camión, pudiendo ésta determinar si ya el camión está vacío o no, e interactuar con el sistema de alarma.
G) En cualquier caso, se puede tener adherido a cada camión un “token” que además de servir de activación del estado de “stand by” puede permitirnos configuraciones personalizadas dependiendo de algunas características físicas del camión. Esto es posible, ya que podemos contar con un sistema de control de acceso de gran cobertura inalámbrica.
H) Se puede incorporar un sistema de reconocimiento automático de los montacargas por medio de un código de barras o QR en la parte superior de los mismos, o al estilo del punto anterior G).
Como ya hemos mencionado anteriormente, este sistema de monitoreo inteligente se configura previamente por medio del software Vision Assistant, el cual nos permite, tanto la calibración del sensor, como definir el modo de operación del mismo. Una vez dado este paso, este sensor es capaz de operar libremente sin conexión ethernet ni CAN, por tanto, sin necesidad de estar conectado a un computador.
Otras aplicaciones:


Referencias
[2] https://ilumeyco.com/de-interes/grupo-ilumeyco-a-la-vanguardia-de-la-disrupcion-tecnologica-global/
[3] https://www.ifm.com/es/es/es/company/about-us-es
[4] https://www.wurzer-kollegen.de/wp-content/uploads/2019/12/IFM_MIPLM_Series_Case_Study.pdf
[5] https://www.ifm.com/na/en/productnews/220
[6] https://www.ifm.com/ie/en/shared/technologies/3d-smart-sensor-o3m/3d-smart-sensor-o3m
[8] https://www.ifm.com/us/en/product/O3M950
[9] https://www.ifm.com/au/en/product/O3M261
[10] https://www.ifm.com/au/en/product/CR0403?tab=accessories
[11] https://www.ifm.com/mounting/706424UK.pdf
[13] https://www.ifm.com/us/en/product/O3M261
[14] https://www.ifm.com/au/en/product/O3M261?tab=documents
[15] https://www.mathworks.com/help/vision/ug/camera-calibration.html#buvr2qb-2
[17] https://www.ifm.com/us/en/product/DV2510
 Dr. Edward Blanco
Dr. Edward Blanco
Director de Investigación, Desarrollo e Innovación
Grupo ilumeyco
e.blanco@ilumeyco.com
eblanco@ieee.org
https://orcid.org/0000-0002-0585-0413
 809 583 4255
809 583 4255 Av. Sabana Larga No. 160, Reparto Oquet, Santiago, Rep. Dom
Av. Sabana Larga No. 160, Reparto Oquet, Santiago, Rep. Dom
Deja tu comentario: